This course introduces students to the concept of estimation and gives them the first tools to solve the filtering problem. At first, the course gives elementary notions of probability and covers random processes. The concept of autocorrelation, spectral functions, central moments, and randoma variable transformations are here analyzed. The class covers the response of linear systems to random inputs.
Afterwards, basic estimation techniques are covered, with focus on Maximum Likelihood, Least Square, Maximum A Posteriori, and Minimum Mean Square Error. The students learn how to obtain estimates according to the different approaches.
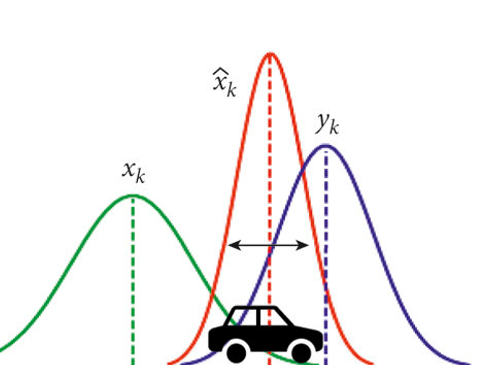
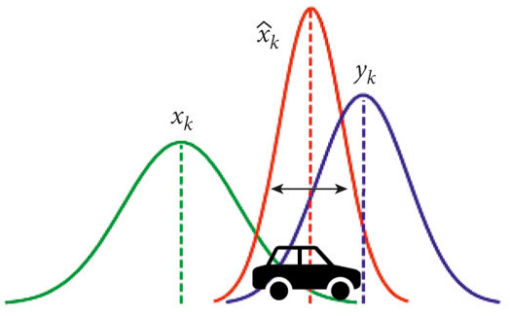
Laslty, the propagation of uncertainties and estimation are merged to derive the discrete and continuous Kalman filter, with focus on theory and applications. Smoothing is shown and analyzed. Then, thanks to linearization of nonlinear dynamics, the Linearized (LKF) and Extended Kalman Filter (EKF) are studied. Afterwards, the Unscented Transfoamtion and the Unscented Kalman Filter (UKF) is covered. To conclude, Particle Filtering is introduced with an explanation of the Bootstrap Particle Filter (BPF), with examples.
Course primarly for graduate students, open to qualified undergraduates
AERE Catalog